Appearance
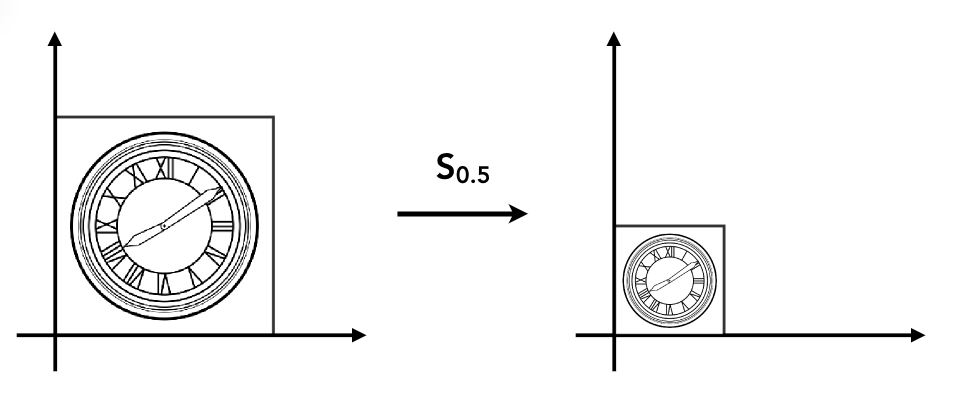
01.
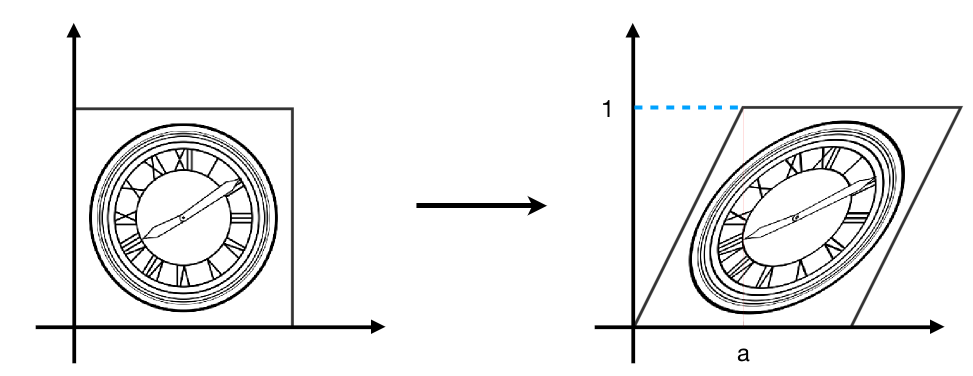
02.
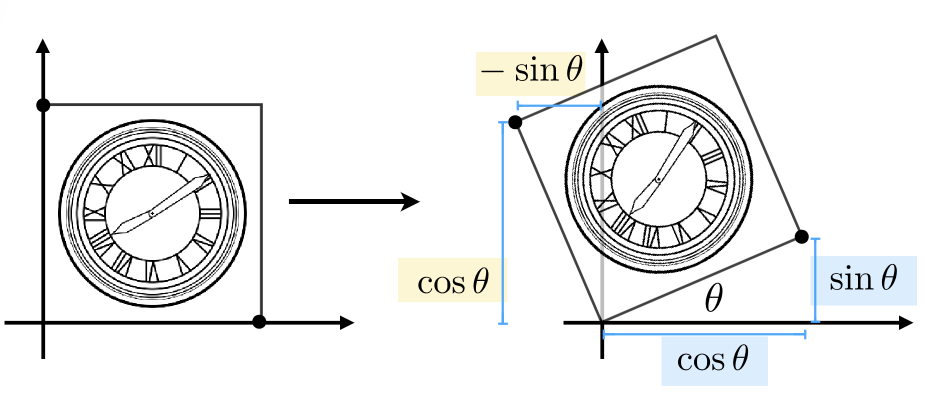
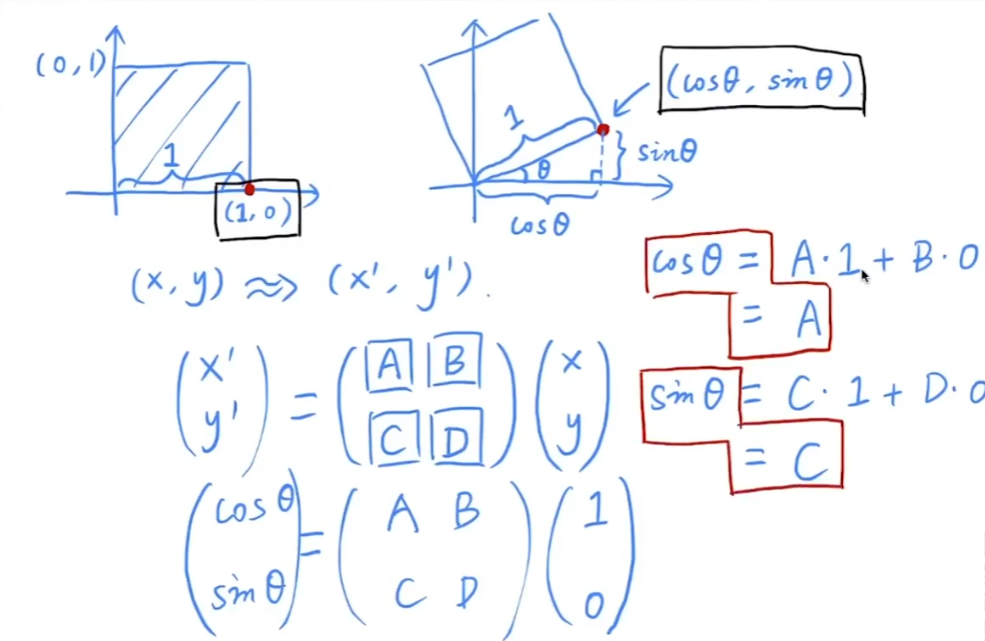
推导:
03.
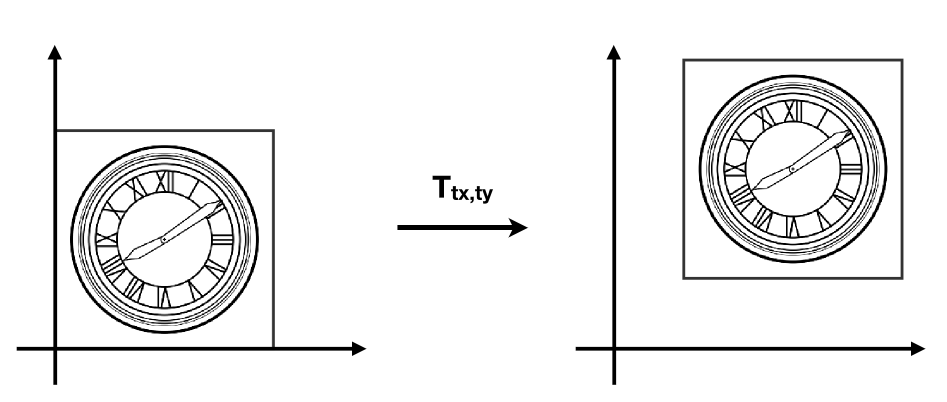
平移变换的特殊性:平移变换不是线性变换,想统一处理所以引入齐次坐标。
特殊性:平移变换不是线性变换,想统一处理所以引入齐次坐标。
方法:增加一个维度。
注:向量具有平移不变性,所以此处 1 0
平移的矩阵表示:
04.
仿射变换 = 线性变换 + 平移变换
使用齐次坐标
05.
06.
07.
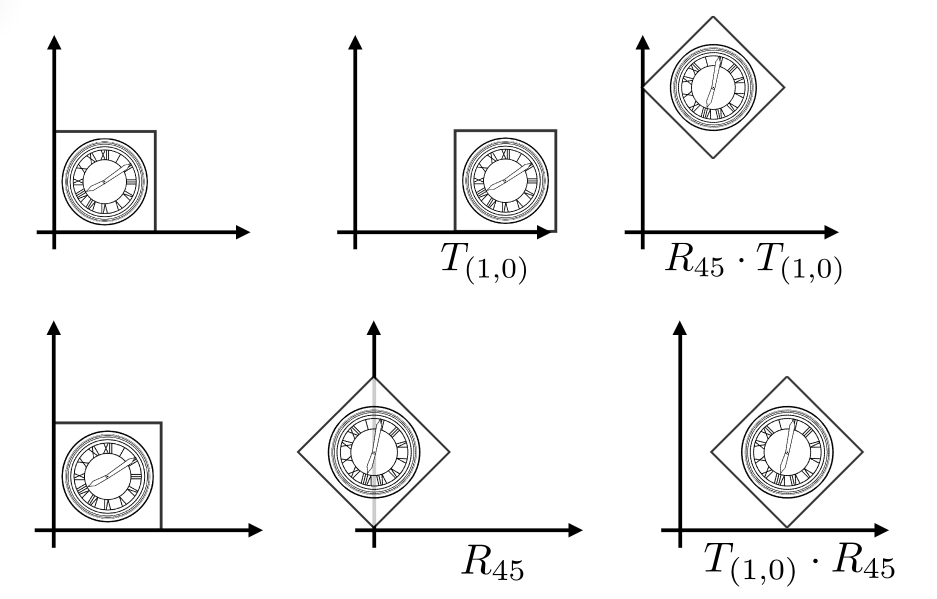
先平移后旋转 与 先旋转后平移
矩阵乘法不满足交换律
注意,矩阵是从右向左应用的
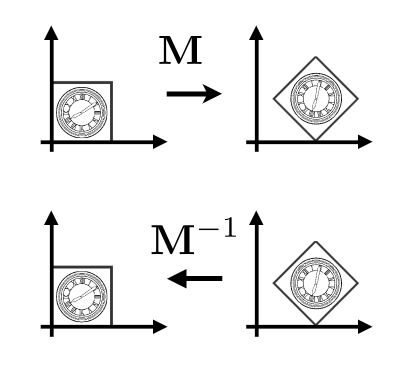
分解复合变换
08.
使用4x4的矩阵:
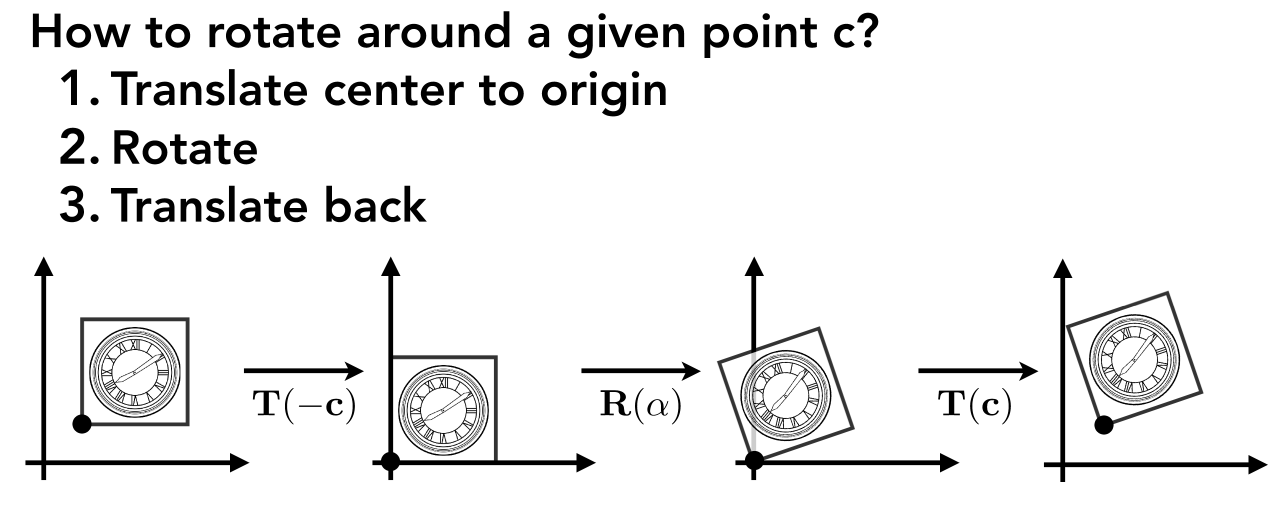
问题:线性变换先还是平移变换先? 答:看矩阵运算顺序[04.仿射变换]。